标志点。
对称件的自动拼接扫描策略。
对称件对齐坐标系的方法。
手动划分领域组。
面片拟合。
修剪。
缝合。
可变倒角。

 任务导引
任务导引
任务描述
使用扫描仪完成给定鼠标各面的三维扫描。
任务材料
来源于鼠标实物。
任务技术要求
高精度完成给定鼠标各面的三维数据扫描,保存扫描得到的数据为.asc文件。
 知识准备
知识准备
一、标志点
1.标志点粘贴要求
2.标志点使用实例
(1)标志点粘贴在物体表面。

(2)标志点主要粘贴在物体的外部。
对于这样一个剃须刀模型,仅仅在它的顶部和侧面布置了少数的几个标志点,大量的标志点不知道测量平台上,这样可以方便地从不同的角度对物体进行扫描,而平台上布置的标志点将作为公共标志点基准进行拼接。

(3)增加外部特征粘贴标志点。
由于其表面的特征很多,很少有合适的空间来布置标志点。由于小特征曲面较多,并且曲面曲率变化较大,导致了表面粘贴标志点不足以控制其空间自由度。此种情形下,可以通过增加外部特征,在转盘的表面粘贴一些标志点,来增加其空间标志点,以提高拼接精度。

(4)平板类小物体的单次测量。
如果物体的尺寸大小一个扫描幅面可以完成,且表面没有深槽类特征,那么无须进行多视角测量,且可以不用粘贴标志点。如:一般的小型冲压件、塑料件的外壳类、浮雕或者产品的某个需要扫描的单面。如以下图所示。

(5)特征较多的物体多视角测量。
对于此类物体,可以将它放置在一个平板上,在平板上贴上标志点,然后物体的表面也粘贴一些标志点,从不同的方向进行扫描。

如果物体表面有足够的空间粘贴标志点,且其外形特征也可以保证标志点在空间分布的自由度控制要求,那么就可以直接利用工件表面的标志点完成工件的多视角扫描。

二、对称件的自动拼接扫描策略
(1)在过渡面上粘贴标志点。
(2)每个视角保证有足够的标志点可以识别。
(3)每个面和下一个过渡面之间保证有至少三个公共标志点。
(4)先对正向一面进行扫描,可以使用扫描转台扫描一周,把点云采集完整。
(5)将工件翻面,同时看到正面过渡面上的至少三个标志点,进行拼接扫描;注意正反面要能完全拼合上。
采用自动拼接方法,如果正反面不能准确拼接上可能跟转台上的点过多,或者光线不够及产品粘贴标志点过多导致。
任务实施
1.扫描工件前期处理
2.扫描步骤
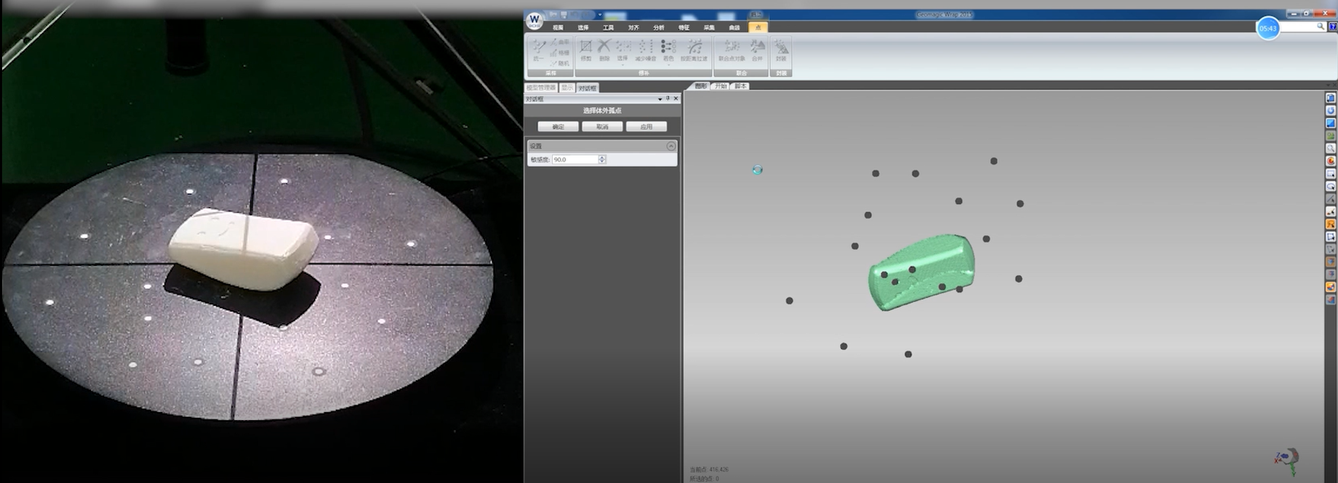
新建工程,给工程起个名字例如“shubiao”,将标准件放置转盘上,确定转盘和标准件在十字中间,尝试旋转转盘一周,在软件实时显示区域观察,以保证能够扫描到整体;观察软件实时显示区域处标准件在该区域的亮度,通过软件中设置相机曝光值来调整亮度;并且检查扫描仪到被扫描物体的距离,此距离可以依据软件左侧实时显示区域的白色十字与黑色十字重合确定,当重合时的距离约为 600mm,600mm 的高度点云提取质量最好。所有参数调整完成后,点击“开始扫描”,开始第一步扫描。

转动转盘一定角度,必须保证与上一步扫描有公共重合部分,这里说的重合是指标志点重合,即上一步和该步能够同时看到至少三个标志点(该单目设备为三点拼接,但是建议使用四点拼接)。

同步骤二类似,向同一方向继续旋转一定角度扫描。

前面四步已经把标准件的上表面数据扫描完成,下面将标准件从转盘上取下,翻转转盘,同时也将标准件进行翻转扫描下表面,通过之前手动粘贴的标志点来完成拼接过程,同步骤二类似,向同一方向继续旋转一定角度,进行扫描。翻面扫描。

转动转盘一定角度,必须保证与上一步扫描有公共重合部分,这里说的重合是指标志点重合,即上一步和该步能够同时看到至少三个标志点(该单目设备为三点拼接,但是建议使用四点拼接)。
到此为止,我们的扫描工作已经完成。在软件的左侧“模型管理器”中选择要保存的点云数据,在工具栏中点击【点】-【联合点对象】按钮,将多组数据合并为一组数据。在合并后的数据位置,点击“鼠标右键”选择对话框中的“保存”按钮,将点云数据保存在指定的目录下,文件的格式为“shubiao.asc”,紧接着我们对其进行点云处理操作。