使用三维扫描仪对非对称异形曲面进行扫描,能提取正确点云数据,并能独立使用Geomagic Wrap软件进行点云数据处理,会使用境界拟合命令进行较为复杂曲面建模,并能进行三维数据检测。
曲面异型零部件(U型杯)非对称件扫描策略。
3D面片草图。
境界拟合。
抽壳。
这是一件非对称的曲面异型零部件(U型杯),为了更好地了解非对称件且有内凹曲面的零件,满足大家对非对称产品的审美需求,利用逆向工程技术对曲面异型零部件(U型杯)的外观、功能进行再创新、再设计。

 任务导引
任务导引任务描述
使用扫描仪完成给定曲面异型零部件(U型杯)各面的三维扫描。
任务材料
曲面异型零部件(U型杯)。
任务技术要求
高精度完成给定曲面异型零部件(U型杯)各面的三维扫描,保存扫描得到的数据为.asc文件或者.txt文件。
 知识准备
知识准备观察发现该曲面异型零部件(U型杯)整体结构不是一个对称模型,为了更方便、更快捷,我们使用辅助工具(转盘)来对其进行拼接扫描。(辅助扫描能够节省扫描的时间,同时也可以减少贴点的数量)。
任务实施
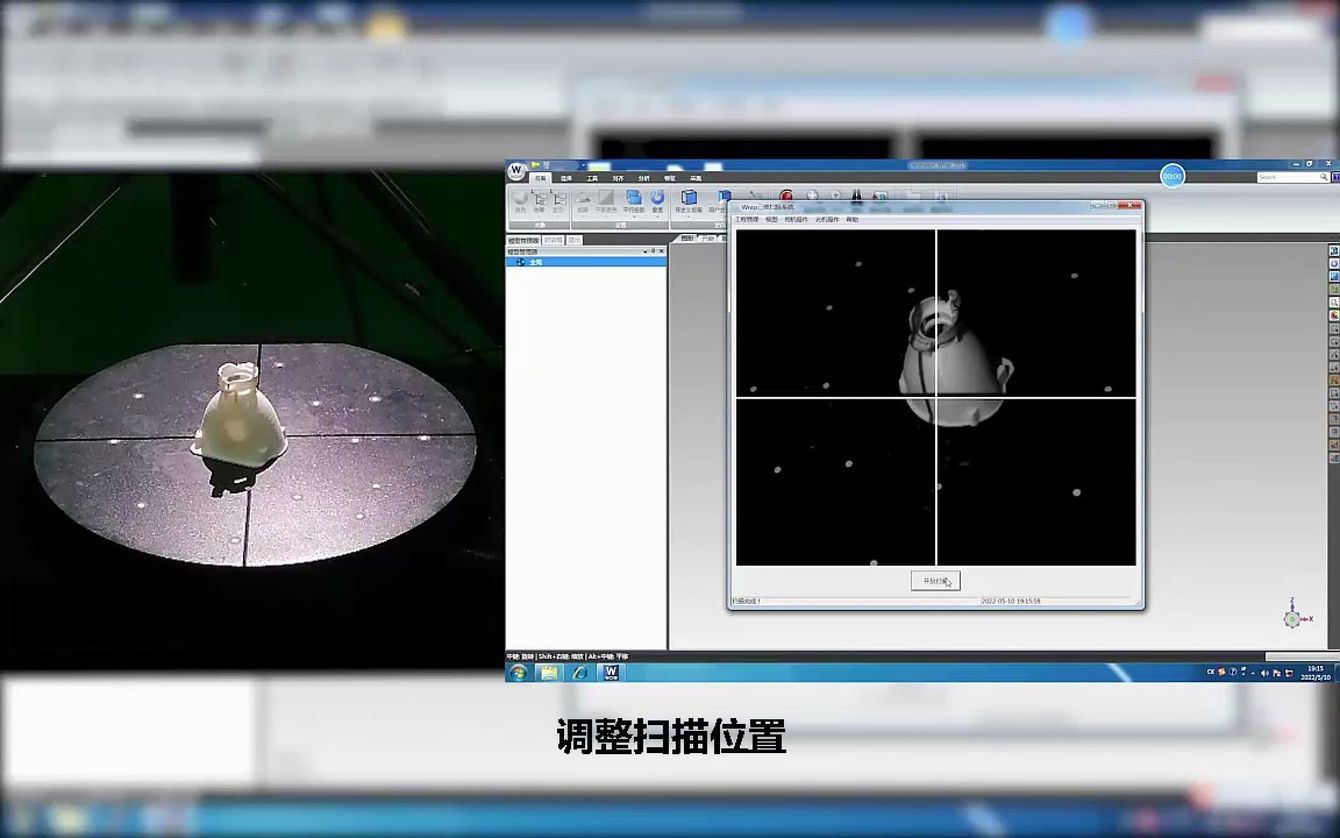
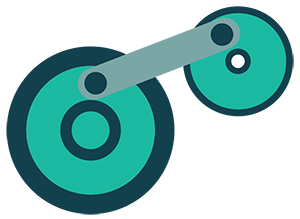
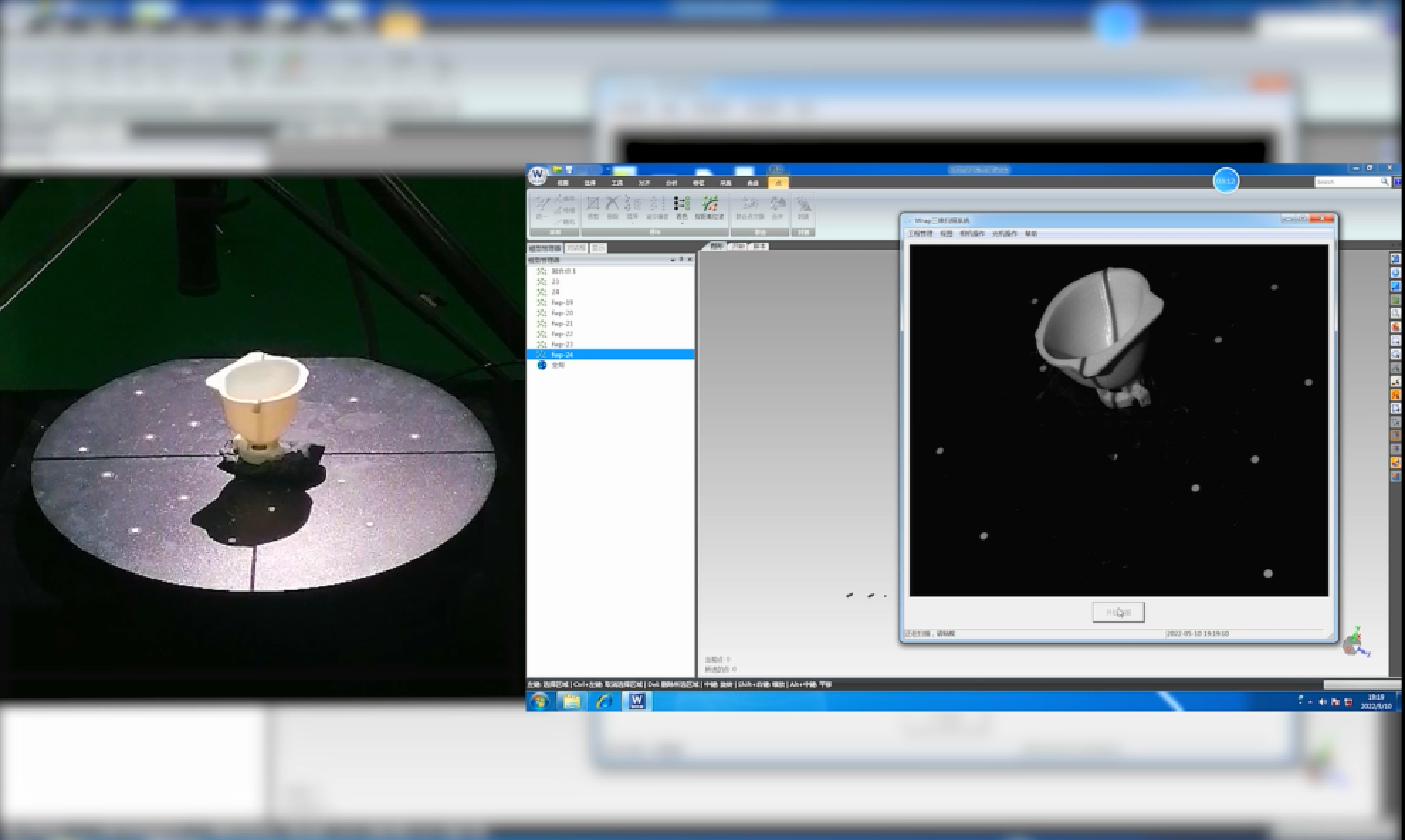
新建工程,给工程起个名字例如“Uxingbei”,将标准件放置转盘上,确定转盘和标准件在十字中间,尝试旋转转盘一周,在软件实时显示区域观察,以保证能够扫描到整体;观察软件实时显示区域处标准件在该区域的亮度,通过软件中设置相机曝光值来调整亮度;并且检查扫描仪到被扫描物体的距离,此距离可以依据软件左侧实时显示区域的白色十字与黑色十字重合确定,当重合时的距离约为 600mm,600mm 的高度点云提取质量最好。所有参数调整完成后,点击“开始扫描”,开始第一步扫描。
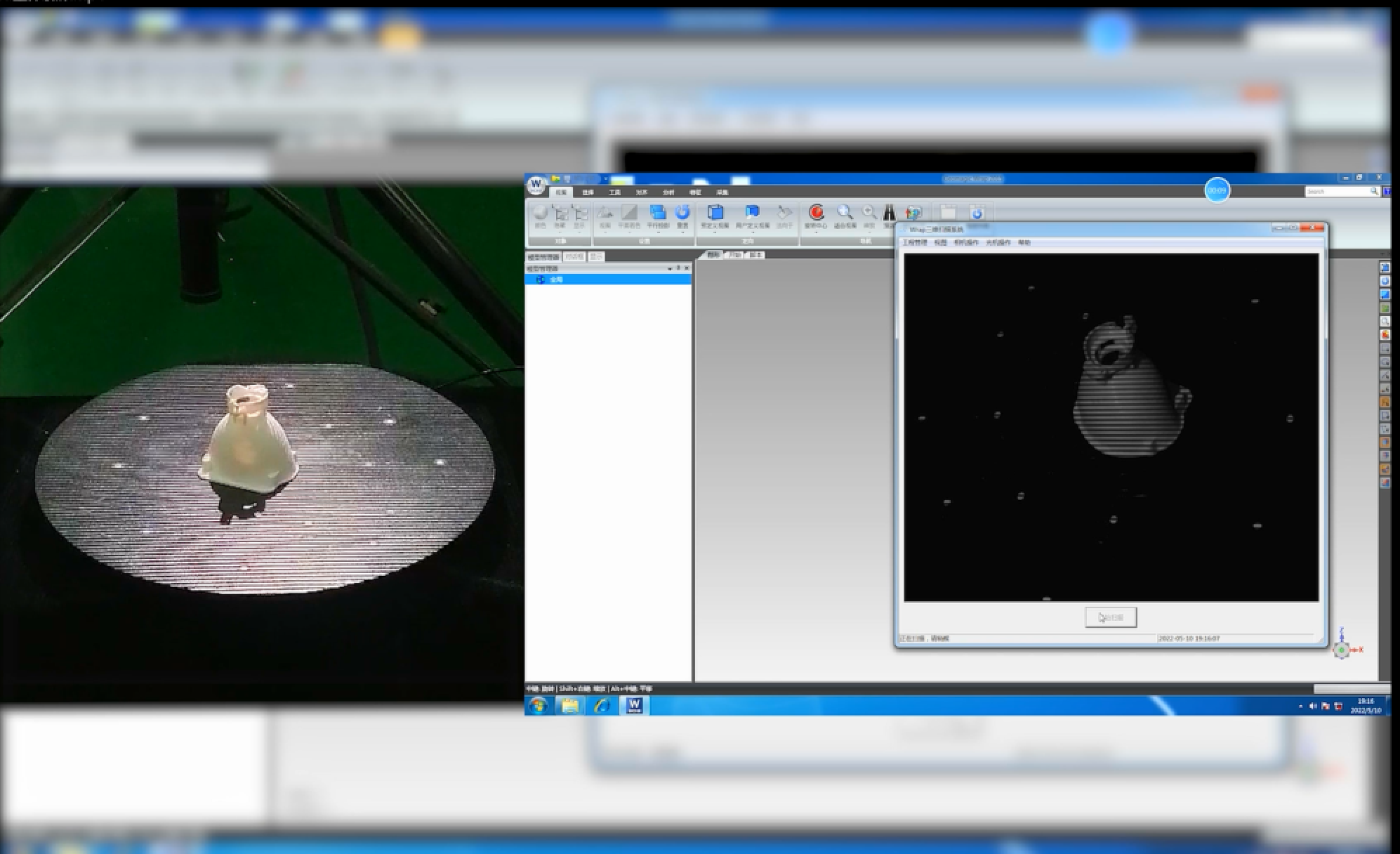
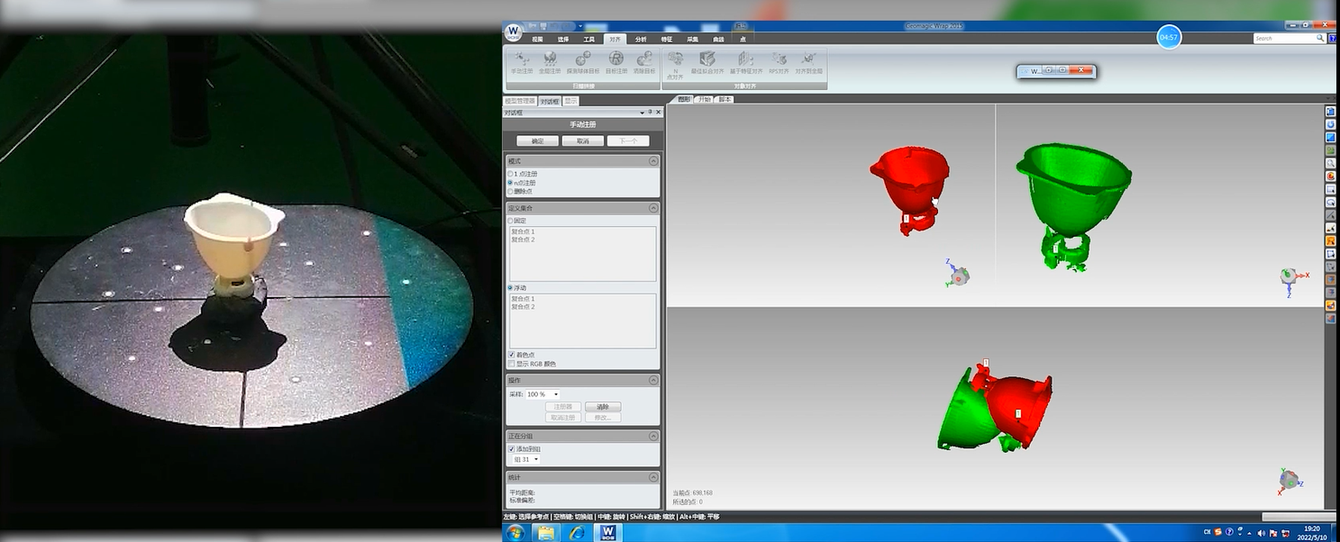
转动转盘一定角度,必须保证与上一步扫描有公共重合部分,这里说的重合是指标志点重合,即上一步和该步能够同时看到至少三个标志点(该单目设备为三点拼接,但是建议使用四点拼接)。

同步骤二类似,向同一方向继续旋转一定角度扫描。

同步骤二类似,向同一方向继续旋转一定角度扫描。
前面四步已经把标准件的上表面数据扫描完成,下面将标准件从转盘上取下,翻转转盘,同时也将标准件进行翻转扫描下表面,通过之前手动粘贴的标志点来完成拼接过程,同步骤二类似,向同一方向继续旋转一定角度,进行扫描。

转动转盘一定角度,必须保证与上一步扫描有公共重合部分,这里说的重合是指标志点重合,即上一步和该步能够同时看到至少三个标志点(该单目设备为三点拼接,但是建议使用四点拼接)。
到此为止,我们的扫描工作完成。在软件中选择“保存所有点云”,将扫描数据另存为“.txt”或者“.asc”格式文件即可。