为了使设计的机构能够运动并具有运动的确定性,必须研究机构的自由度和机构具有运动确定性的条件。
一、平面机构的自由度计算方法
自由度:把构件相对于参考系具有的独立运动参数的数目称为自由度,作平面运动的自由构件有三个自由度。
约束:当两构件组成运动副后,它们之间的某些相对运动受到限制,对于相对运动所加的限制称为约束。每加一个约束就减少一个自由度。
平面低副:引入两个约束,保留一个自由度。
平面高副:引入一个约束,保留两个自由度。
机构自由度计算:机构相对于机架所具有的独立运动数目,称为机构的自由度。
计算公式:
式中,n
PL
PH
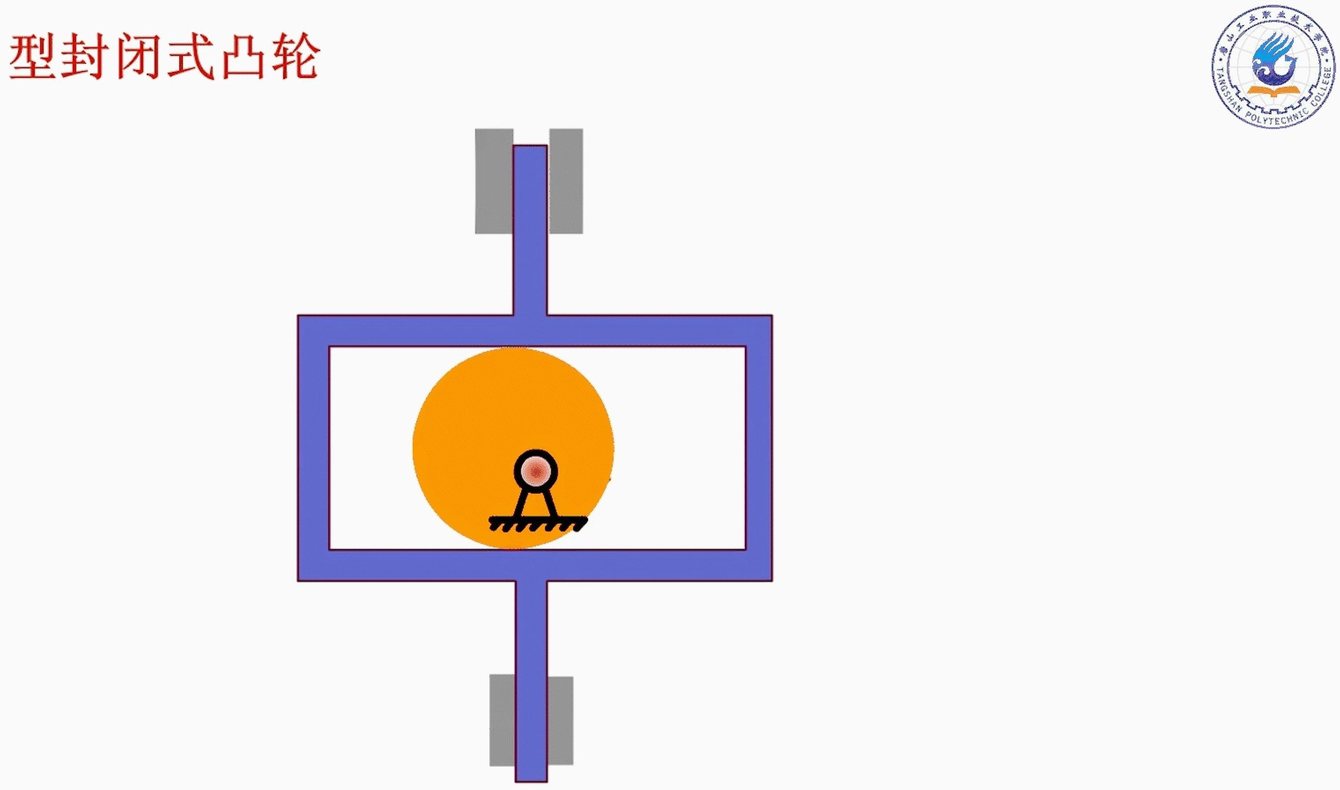
举例:计算图示凸轮机构的自由度。

二、平面机构自由度计算的注意事项
(一)复合铰链
两个以上的构件同时用转动副在同一轴线上构成的连接称为复合铰链。

处理方法:若有m个构件组成复合铰链,则复合铰链处的转动副数应为(m-1)个。在计算机构自由度时应注意识别复合铰链,不要把它当成一个转动副进行计算。
(二)局部自由度
机构中不影响其输出与输入运动关系的个别构件独立运动的自由度,即与机构运动无关的构件独立运动称为局部自由度。
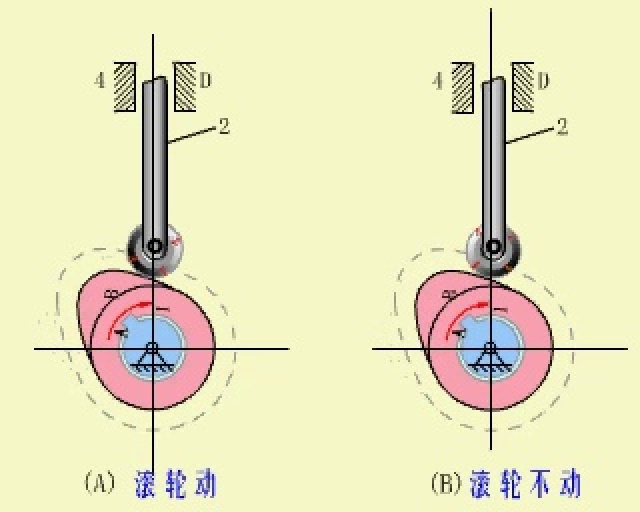
处理方法:在计算机构自由度时,应预先排除。
如上图所示平面凸轮机构中,为减少高副接触处的磨损,在从动件2上安装一个滚子3,使其与凸轮1的轮廓线滚动接触。显然,滚子绕其自身轴线的转动与否并不影响凸轮与从动件间的相对运动,因此滚子绕其自身轴线的转动为机构的局部自由度。在计算机构自由度时应预先将转动副C和构件3除去不计,如图所示,设想将滚子3与从动件2固连在一起,作为一个构件来考虑。此时该机构中,,,。
该机构自由度为:
(三)虚约束
在机构中与其他约束重复而不起限制运动作用的约束称为虚约束,又称为重复约束、消极约束。
平面机构的虚约束常出现在下述场合:
(1) 两个构件在多处构成多个移动副,且各移动副的导路重合或平行时,只有一个移动副起约束作用,其余部是虚约束。
(2)两构件在多处构成多个转动副,且各转动副的轴线重合,此时只有一个转动副起用,其余为虚约束。
(3)两构件之间构成高副,多处接触且公法线重合;此时只考虑一个高副,其余均为虚约束。
(4)机构中某两构件用转动副相连的连接点,在组成运动副前后,其各自的轨迹重合,则此连接带入的约束为虚约束。

连杆中间处为虚约束。
(5)机构中对传递运动不起独立作用的对称部分。
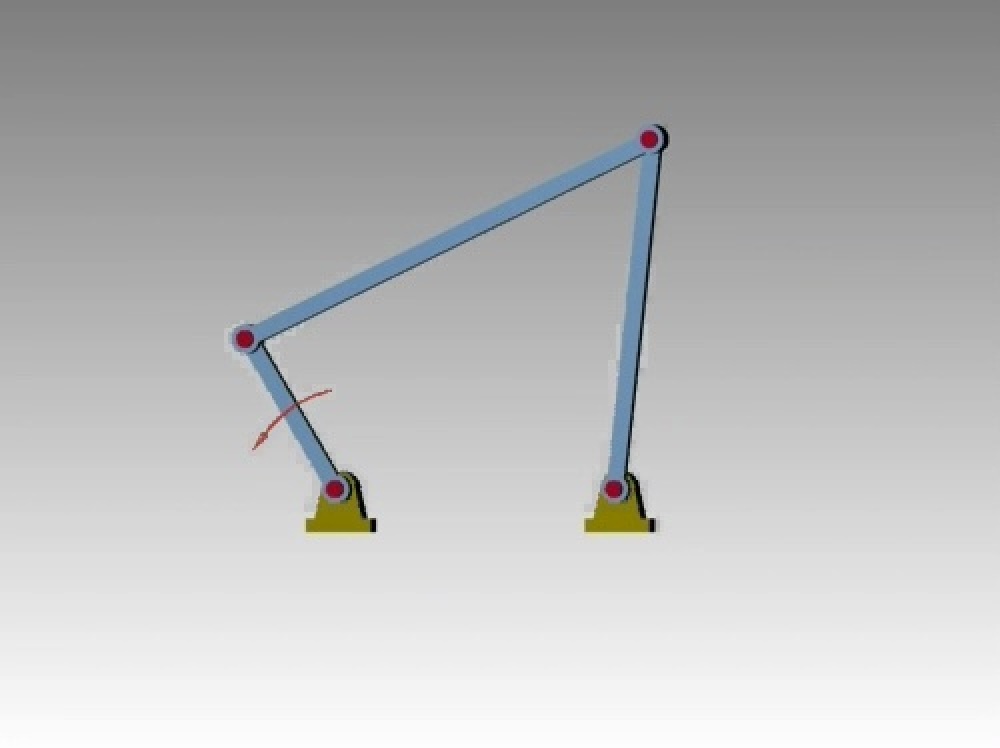
三、机构具有确定运动的条件
机构具有确定的运动是指,机构中所有的构件在任一瞬时的运动都是完全确定的。意味着机构的自由度一定满足。
机构具有确定相对运动的条件:自由度大于零,且机构原动件数应等于机构自由度数,。