一、铰链四杆机构的运动特性
(一)平面四杆机构的极位
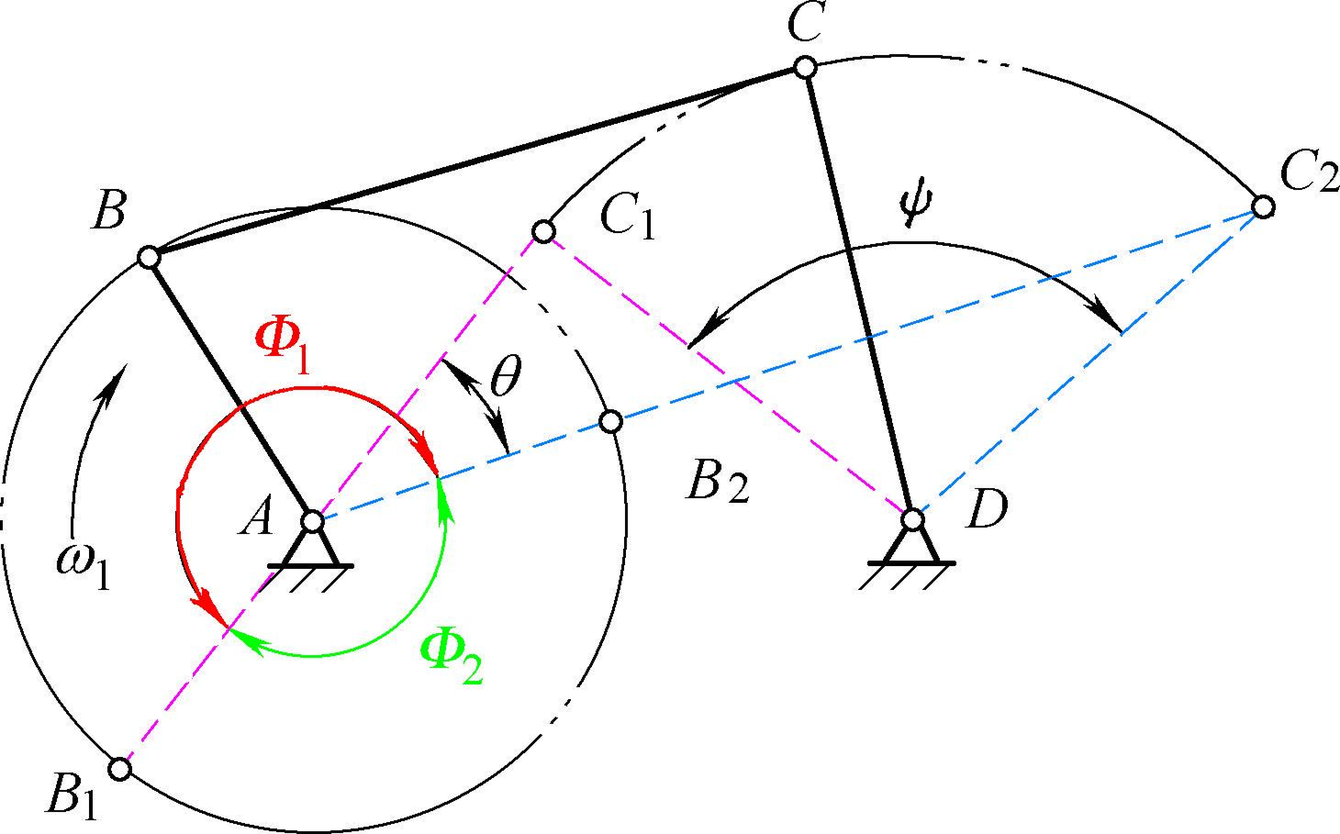
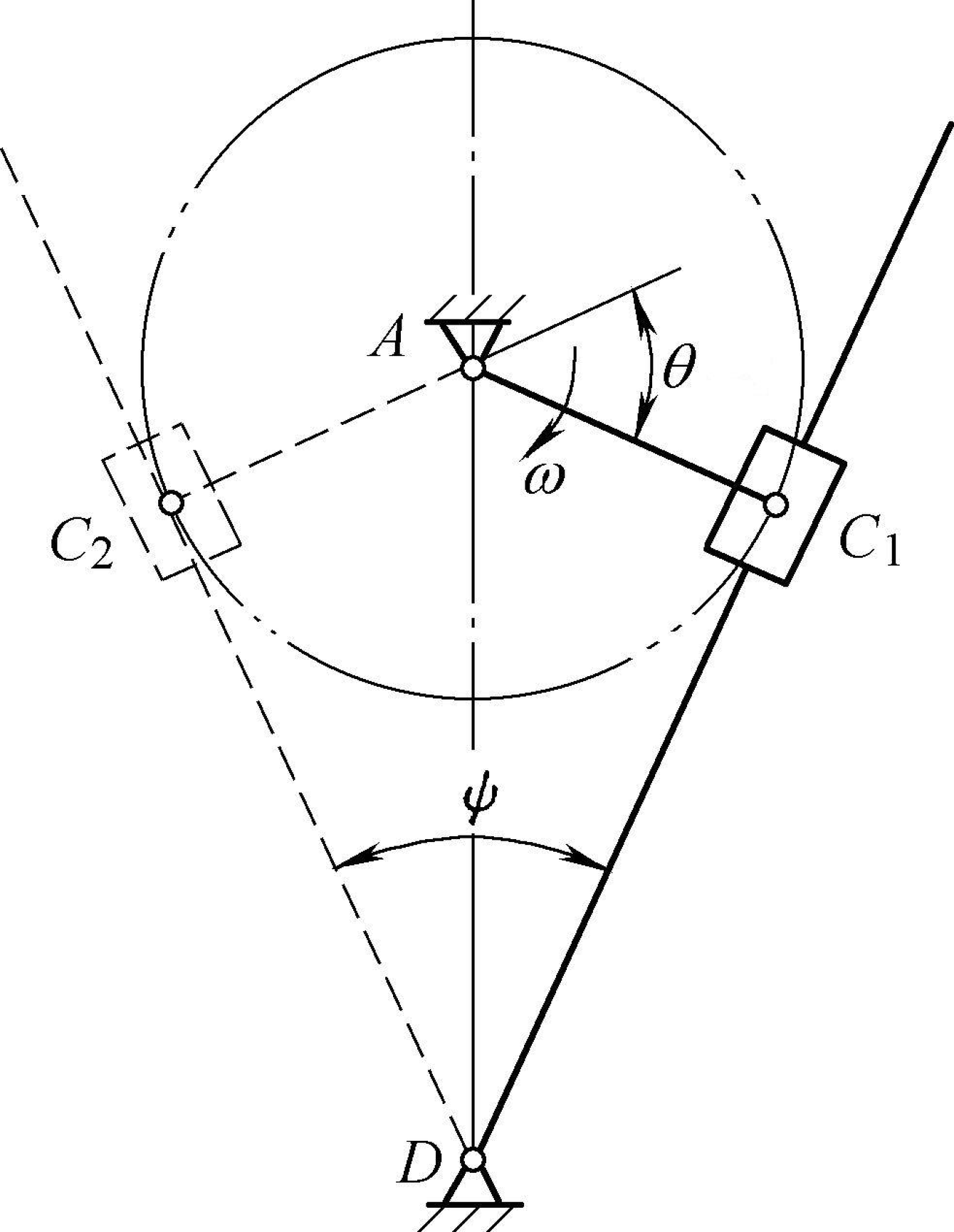
曲柄摇杆机构、摆动导杆机构和曲柄滑块机构中,当曲柄为原动件时,从动件往复摆动或往复移动,存在左、右两个极限位置,称为极位。
从动件处于两个极位时,曲柄对应两位置所夹的锐角θ,称为极位夹角;两个极位间的夹角Ψ,称为最大摆角。
(二)急回特性
机构工作件返回行程速度大于工作行程的特性。
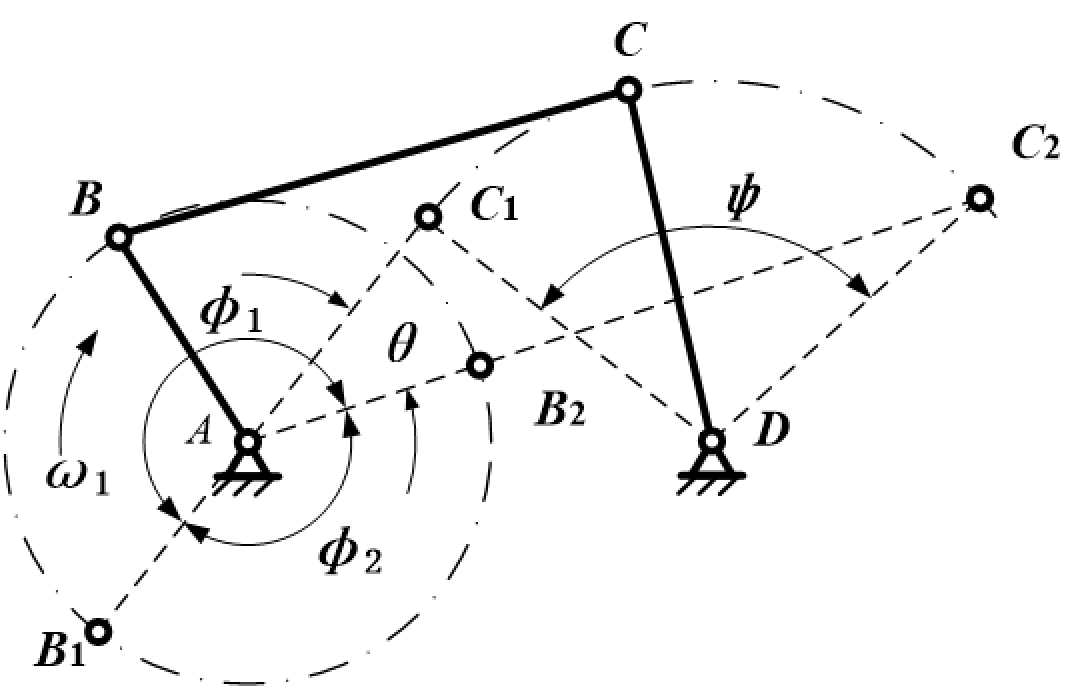
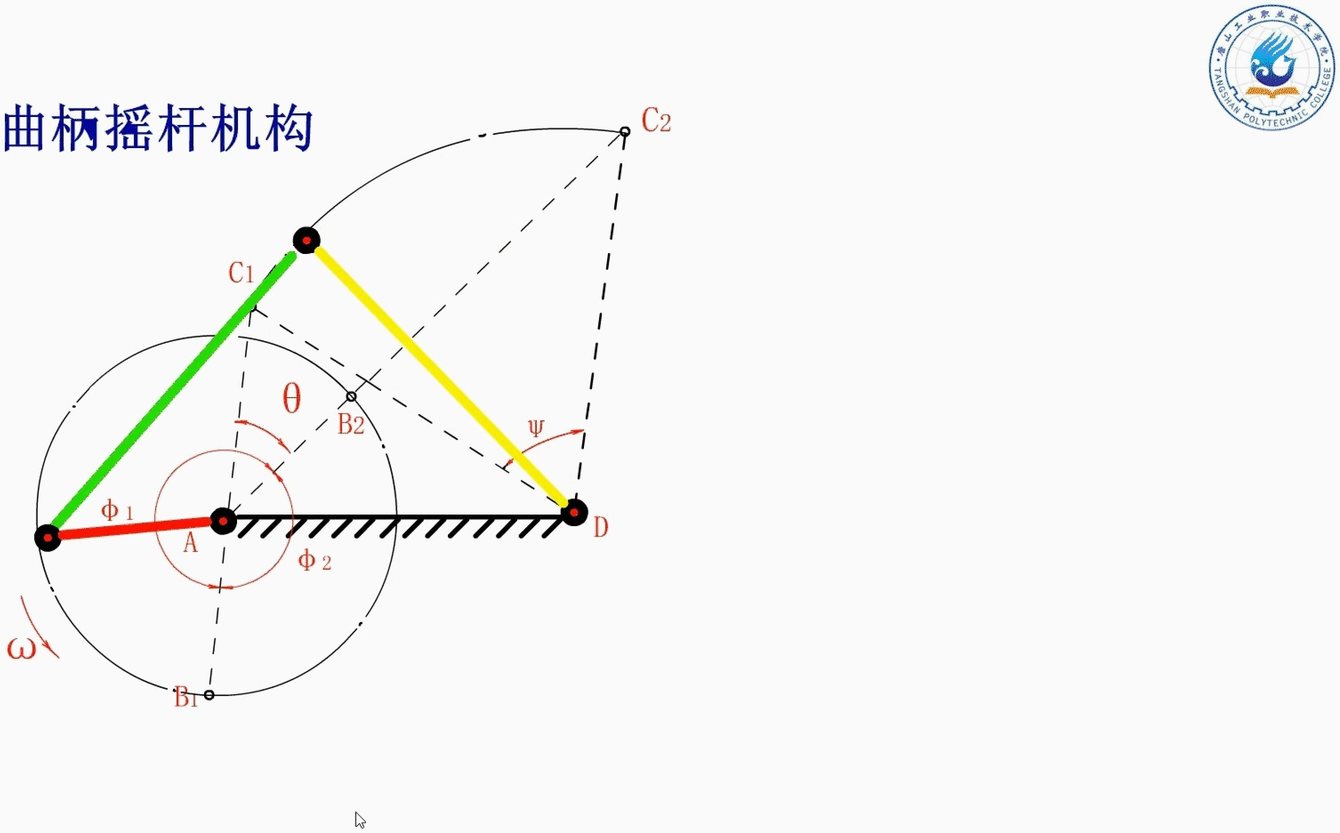
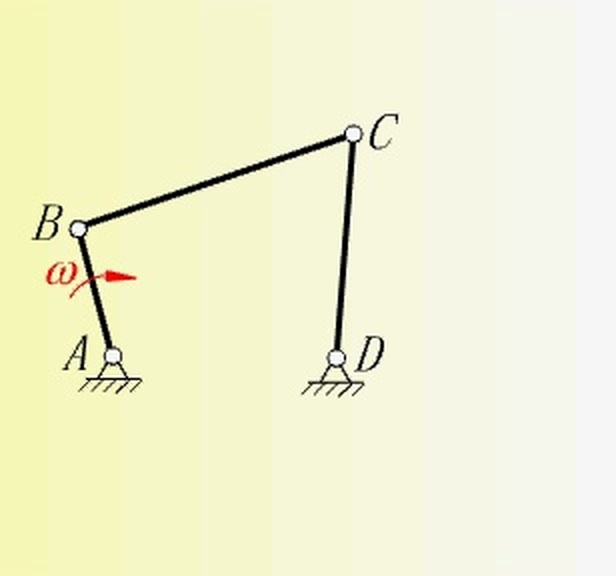
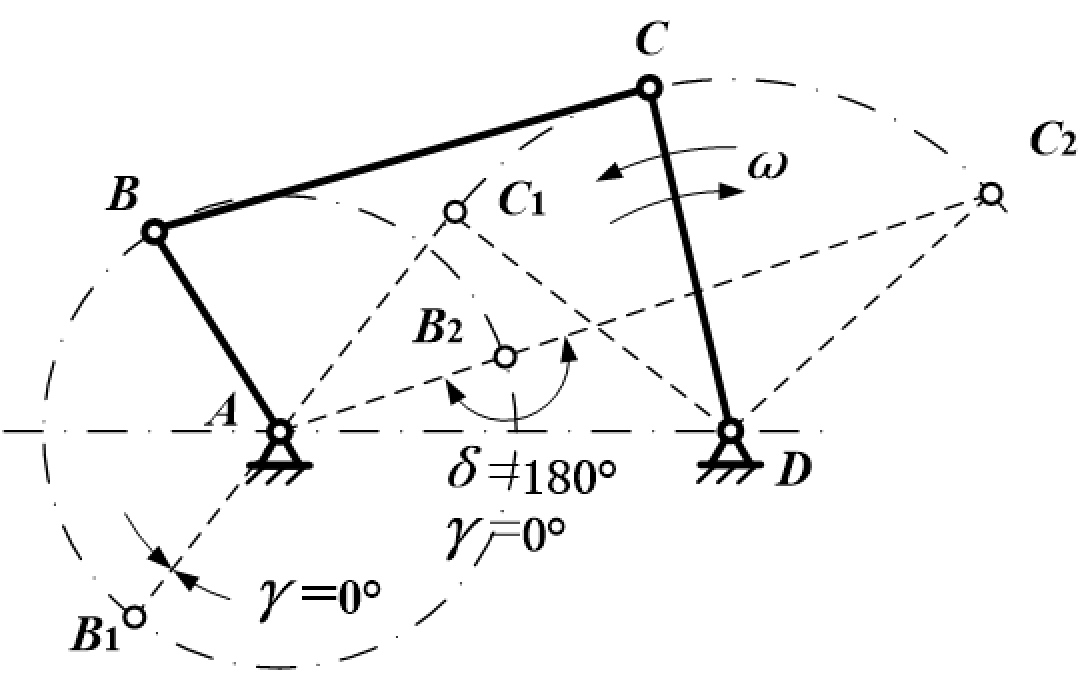
如上图所示的曲柄摇杆机构,曲柄AB为原动件,摇杆CD为从动件。原动件AB在一周的等速回转过程中,有两次与连杆共线,这时摇杆CD分别处于左右两个极限位置C1D和C2D,称为极位。机构在极位时,原动件AB所处两个位置之间所夹的锐角θ,称为极位夹角。
由于曲柄AB等速回转,其转角Φ1>Φ2,因此t1> t2,故ν2>ν1。由此得出:摇杆在空回行程的平均速度大于工作行程的平均速度,这种特性称为机构的急回特性。
机构急回特性的大小,常用行程速比系数K 来表示。
由式(3-6)可推出极位夹角θ的计算式:
上述分析表明,平面四杆机构具有急回特性的条件是:
原动件等角速整周转动,即曲柄为原动件。
输出件作往复运动。
极位夹角满足θ≠0。
常见的具有急回特性的机构:曲柄摇杆机构、偏置曲柄滑块机构、摆动导杆机构。
二、铰链四杆机构的传力特性
(一)压力角与传动角
在不计摩擦力、惯性力和重力时,从动件上受力点的速度方向与所受作用力方向之间所夹的锐角,称为机构的压力角,用α表示。压力角的余角γ=π/2-α,称为机构的传动角。压力角α或传动角γ是衡量传力性能的重要指标。
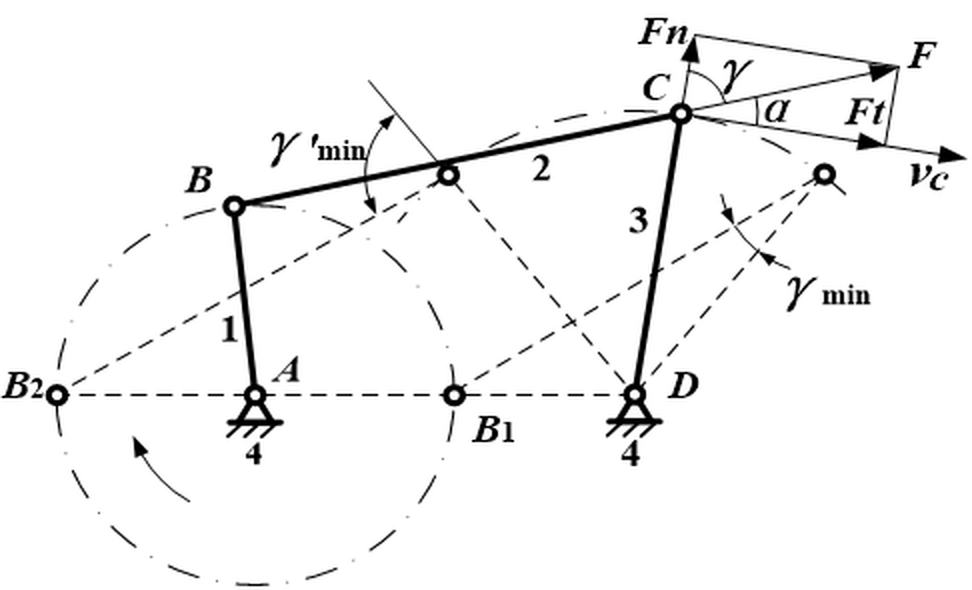
力F可分解为沿υc方向的有效分力和垂直于υc方向的有害分力。
为了保证机构具有良好的传动性能,一般应使最小传动角。机构在运动过程中,压力角α和传动角γ是随机构位置而变化的。可以证明,γmin必出现在曲柄AB与机架AD两次共线位置之一。
(二)止点位置
如上图所示的曲柄摇杆机构,若以摇杆CD为原动件,曲柄AB为从动件。不计构件的重力、惯性力和运动副中的摩擦阻力的条件下,当摇杆为主动件,连杆和曲柄共线时,过铰链中心A的力,对A点不产生力矩,这时,无论我们在原动件上施加多大的力都不能使曲柄转动,机构的这种位置称为止点。
如果考虑运动副中的摩擦,则不仅处于止点位置时的机构无法运动,而且处于止点位置附近的一定区域内,机构同样会发生“卡死”现象,称为自锁现象。
显然,止点位置就是作往复运动的构件的极限位置,但只有当时,极限位置才称为止点位置。所以对于曲柄滑块机构、摆动导杆机构及双摇杆机构中,都可能存在止点位置。
对于传动机构而言,止点会使机构处于停顿或运动不确定状态,它是不利的。例如,脚踏式缝纫机,有时出现踩不动或倒转现象,就是踏板机构处于止点位置的缘故。
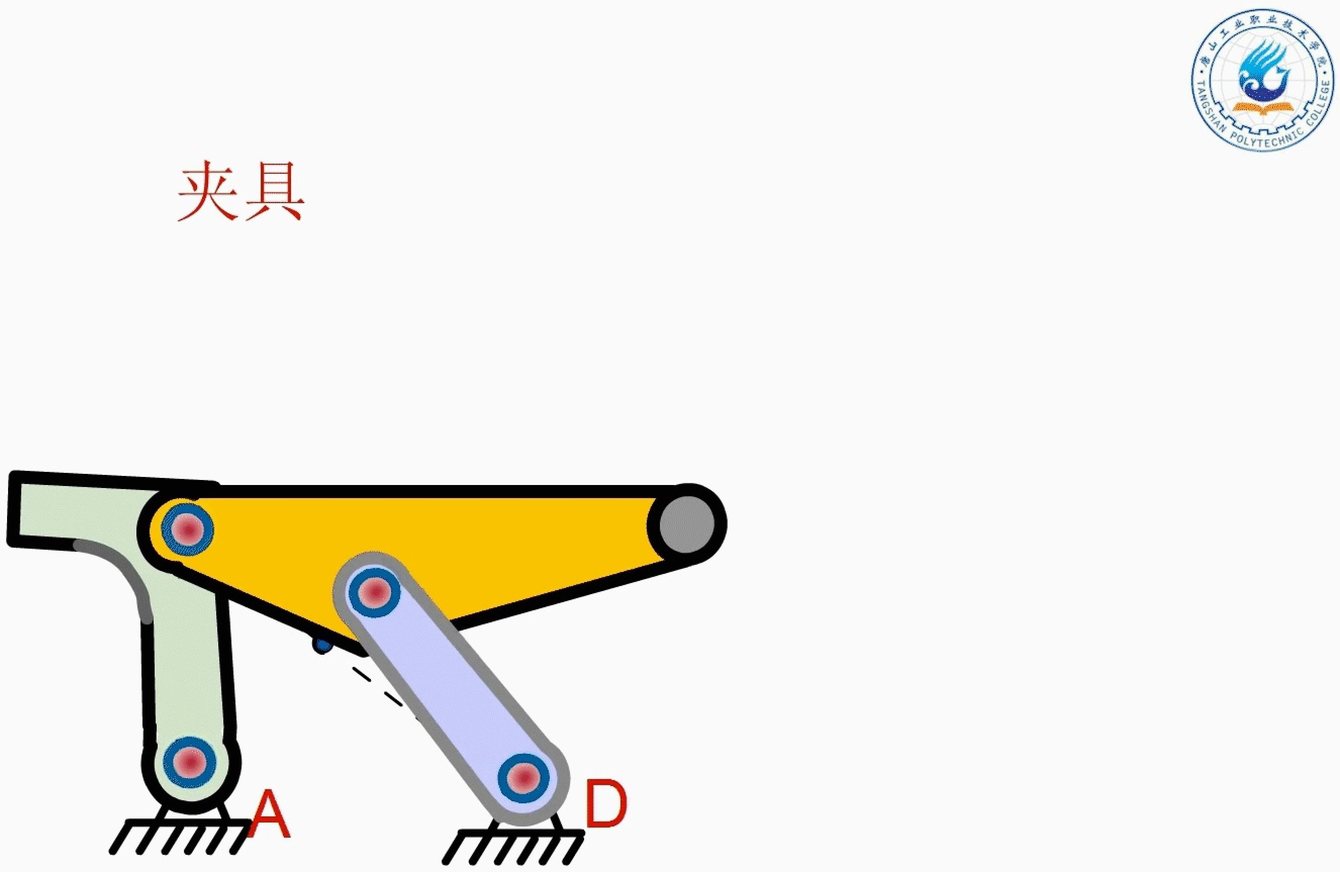
在工程实践中,也常常利用机构的止点位置来实现一些特定的工作要求。如下图所示钻床夹具,就是利用止点位置夹紧工件,并保证在钻削加工时工件不会松脱。
提示:
(1)原动件等角速整周转动,即曲柄为原动件。
(2)输出件作往复运动。
(3)极位夹角满足θ≠0。
常见的具有急回特性的机构:曲柄摇杆机构、偏置曲柄滑块机构、摆动导杆机构。
提示:
当传动角,压力角时作往复运动的构件的极限位置即为止点位置。


